Introdução
O Python é a principal linguagem hoje para machine learning, e isso, infelizmente, não tem discussão. Contudo, com o pacote reticulate, é possível utilizar diretamente as biliotecas do Python no R sem grandes problemas. Isto é, uma vez que você tenha instalado tudo que é necessário. A função install_miniconda() ajuda no processo. No entanto, é preciso também instalar o Pytorch no ambiente que será utilizado pelo reticulate. Na minha máquina (e o padrão é assim), utilizo o ambiente r-reticulate.
Para exemplificar o uso do Pytorch, neste post será treinado um modelo que dá origem a aplicação Seefood que ficou famosa no seriado Silicon Valley da HBO. Esse modelo consiste em classificar uma imagem de comida em “hot dog” ou “not hot dog”. Em resumo, conforme essa wiki, a história pode ser resumida da seguinte forma:
SeeFood was a pitch made up in the conference room by Erlich. It was supposed to be Shazam for food, but development stopped after the algorithm could only detect hot dogs. Erlich sold his equity before SeeFood was bought by Periscope for 30 million dollars making Jian-Yang “a very rich man”.
O código desse post segue em grande parte o tutorial disponível no portal do Pytorch. É bom lembrar que a escolha do Pytorch para esse post envolve apenas um interesse meu em conhecer esse framework. Obviamente, o mesmo modelo poderia ser treinado no tensorflow sem nenhum problema. Este post é apenas um experimento e o blog está servindo de arquivo. 🤓
Pacotes e Módulos
Aqui estão listados os pacotes do R e bibliotecas do Python que iremos utilizar neste post. As biblotecas do Python que serão utilizadas são: torch, torchvision, numpy e copy.
library(reticulate)
library(imager)
library(glue)
library(tidyverse)
library(zeallot)
# Bibliotecas e módulos do python
py <- import_builtins()
torch <- import("torch")
torchvision <- import("torchvision")
np <- import("numpy")
copy <- import("copy")
transforms <- torchvision$transforms
datasets <- torchvision$datasets
models <- torchvision$models
optim <- torch$optim
nn <- torch$nn
F <- torch$nn$functionalDados
Os dados para esse post estão disponívels no Kaggle neste link. Foram utilizadas as imagens da pasta seefood. As imagens estão incialmente separadas apenas em treino e teste. Iremos, adicionalmente, criar a pasta validação e copiar algumas imagens da pasta de teste para essa nova pasta.
data_dir <- "../../dados/seefood"
if(!dir.exists(file.path(data_dir, "valid"))){
dir.create(file.path(data_dir, "valid"))
dir.create(file.path(data_dir, "valid/hot_dog"))
dir.create(file.path(data_dir, "valid/not_hot_dog"))
classes <- c("hot_dog", "not_hot_dog")
for(classe in classes){
images <- list.files(file.path(data_dir, "test", classe))
set.seed(39031)
images <- sample(images, 75)
for(image in images){
file.copy(
from = file.path(file.path(data_dir, "test", classe, image)),
to = file.path(file.path(data_dir, "valid", classe, image))
)
file.remove(file.path(file.path(data_dir, "test", classe, image)))
}
}
}Dataloaders
Antes de definir propriamente os dataloaders, o código abaixo crias os “transforms” que na prática consistem em pré-processamentos das imagens. Apesar de existir uma enorme variedade de possibilidades, no código abaixo apenas redimensionamos as imagens e normalizamos os pixels para que eles assumam valores entre -1 e 1.
data_trasnforms <- list(
train = transforms$Compose(
list(
transforms$Resize(c(256L, 256L)),
transforms$ToTensor(),
transforms$Normalize(c(0.5, 0.5, 0.5), c(0.5, 0.5, 0.5))
)
),
valid = transforms$Compose(
list(
transforms$Resize(c(256L, 256L)),
transforms$ToTensor(),
transforms$Normalize(c(0.5, 0.5, 0.5), c(0.5, 0.5, 0.5))
)
),
test = transforms$Compose(
list(
transforms$Resize(c(256L, 256L)),
transforms$ToTensor(),
transforms$Normalize(c(0.5, 0.5, 0.5), c(0.5, 0.5, 0.5))
)
)
)O código abaixo cria os dataloaders, que são os objetos que fornecerão os dados ao modelo que será treinado.
# Dataloaders ---------------------------------------------------------------
sets <- c("train", "valid", "test")
image_datasets <- map(sets, ~ {
datasets$ImageFolder(
file.path(data_dir, .x),
data_trasnforms[[.x]]
)
}) %>%
setNames(sets)
dataloaders <- map(sets, ~{
torch$utils$data$DataLoader(
image_datasets[[.x]],
batch_size = 8L,
shuffle = TRUE,
num_workers = 4L
)
}) %>%
setNames(sets)
dataset_sizes <- map_dbl(sets, ~ {
py$len(image_datasets[[.x]])
}) %>%
setNames(sets)
print(dataset_sizes)
train valid test
498 150 350 Abaixo mostramos uma amostra das imagens que formam esse dataset.
class_names <- image_datasets[['train']]$classes
# Visualizando algumas imagens -----------------------------------------------
iter_train <- py$iter(dataloaders[["train"]])
c(images, labels) %<-% iter_next(iter_train)
images <- images$numpy()
labels <- labels$numpy()
labels <- class_names[labels + 1]
layout(matrix(1:4, 2, 2))
for(i in 1:4){
images[i, , , , drop = FALSE] %>%
aperm(c(3, 4, 1, 2)) %>%
as.cimg() %>%
plot(main = labels[i])
}
Função para Treinamento do Modelo
O processo de treinamento é customizado. Isto é, define-se cada passo do processo na função de treinamento (train_model). Apesar de ser a minha primeira experiência com o Pytorch, achei o processo bem intuitivo e de fácil definição, sendo similar ao processo de treinamento customizado do tensorflow. Basicamente, o processo é o seguinte:
- Fase de treinamento:
- Para um batch de imagens, são computadas as predições do modelo.
- As predições são comparadas com os rótulos observados (reais) e é a função de perda (loss) é computada
- Com o valor da função perda calculado, os gradientes são calculados e aplicados para atualização dos pesos (parâmetros) do modelo.
- Fase de validação:
- Para um batch de imagens, são computadas as predições do modelo.
- Nessa fase, os gradientes não são computados
Ao final de cada “epoch”, são computados os valores finais da função de perda e da acurácia para os dados de treino e de validação.
train_model <- function(model, criterion, optimizer, scheduler, num_epochs = 25){
# Guarda os valores dos pesos e da acurácia para a "melhor" epoch
best_model_wts = copy$deepcopy(model$state_dict())
best_acc = 0
for (epoch in 1:num_epochs) {
cat(glue("Epoch {epoch}/{num_epochs}"), "\n")
cat("-----------------------------\n")
for (phase in c("train", "valid")) {
if (phase == "train") {
model$train()
} else {
model$eval()
}
running_loss <- 0
running_corrects <- 0
iter_data <- py$iter(dataloaders[[phase]])
while (TRUE) {
data <- iter_next(iter_data)
if (is.null(data)) {
break
}
inputs <- data[[1]]
inputs <- inputs$to(device)
labels <- data[[2]]
labels <- labels$to(device)
optimizer$zero_grad()
with(torch$set_grad_enabled(phase == "train"), {
outputs <- model(inputs)
preds <- torch$max(outputs, 1L)$indices
loss <- criterion(outputs, labels)
# backward + optimize only if in training phase
if (phase == "train") {
loss$backward()
optimizer$step()
}
})
running_loss <- running_loss + loss$item() * inputs$size(0L)
running_corrects <- running_corrects + sum(preds$cpu()$numpy() == labels$cpu()$numpy())
}
if (phase == "train") {
scheduler$step()
}
epoch_loss <- running_loss / dataset_sizes[[phase]]
epoch_acc <- running_corrects / dataset_sizes[[phase]]
cat(glue("{phase} Loss: {round(epoch_loss,4)} Acc.: {round(epoch_acc, 4)}"), "\n")
if (phase == "valid" & epoch_acc > best_acc) {
best_acc <- epoch_acc
best_model_wts <- copy$deepcopy(model$state_dict())
}
}
}
model$load_state_dict(best_model_wts)
cat("-----------------------------\n")
cat(glue("Best val Acc: {round(best_acc, 4)}"), "\n")
return(model)
}Definindo o modelo
Aqui utilizamos uma técnica conhecida como Transfer Learning. Isto é, utilizamos um modelo que foi pré-treinado em uma base maior e que já “aprendeu” a extrair features das imagens para auxiliar no treinamento do nosso modelo. Na prática iremos só redimensionar a última camada para que o output seja de dimensão 2 (número de classes da nossa base) e treinar o modelo mais um pouco para que ele se ajuste melhor à nossa tarefa.
model_ft <- models$resnet34(pretrained = TRUE)
num_ftrs <- model_ft$fc$in_features
model_ft$fc <- nn$Linear(num_ftrs, 2L)
device <- torch$device("cuda:0")
model_ft <- model_ft$to(device)
criterion <- nn$CrossEntropyLoss()
optimizer_ft = optim$AdamW(model_ft$parameters(), lr = 5e-5)
lr_scheduler <- optim$lr_scheduler
exp_lr_scheduler = lr_scheduler$StepLR(optimizer_ft, step_size = 4L, gamma = 0.1)
model_ft <- train_model(
model_ft,
criterion,
optimizer_ft,
exp_lr_scheduler,
num_epochs = 12L
)
Epoch 1/12
-----------------------------
train Loss: 0.4157 Acc.: 0.8032
valid Loss: 0.2799 Acc.: 0.8533
Epoch 2/12
-----------------------------
train Loss: 0.174 Acc.: 0.9378
valid Loss: 0.2975 Acc.: 0.88
Epoch 3/12
-----------------------------
train Loss: 0.0842 Acc.: 0.9699
valid Loss: 0.246 Acc.: 0.8867
Epoch 4/12
-----------------------------
train Loss: 0.112 Acc.: 0.9659
valid Loss: 0.2861 Acc.: 0.9067
Epoch 5/12
-----------------------------
train Loss: 0.127 Acc.: 0.9478
valid Loss: 0.2874 Acc.: 0.8933
Epoch 6/12
-----------------------------
train Loss: 0.0981 Acc.: 0.9538
valid Loss: 0.325 Acc.: 0.8467
Epoch 7/12
-----------------------------
train Loss: 0.0759 Acc.: 0.9739
valid Loss: 0.2787 Acc.: 0.8933
Epoch 8/12
-----------------------------
train Loss: 0.0365 Acc.: 0.992
valid Loss: 0.2737 Acc.: 0.9
Epoch 9/12
-----------------------------
train Loss: 0.0678 Acc.: 0.9719
valid Loss: 0.3268 Acc.: 0.8467
Epoch 10/12
-----------------------------
train Loss: 0.0372 Acc.: 0.994
valid Loss: 0.4178 Acc.: 0.8133
Epoch 11/12
-----------------------------
train Loss: 0.0293 Acc.: 0.988
valid Loss: 0.2825 Acc.: 0.8867
Epoch 12/12
-----------------------------
train Loss: 0.0563 Acc.: 0.9819
valid Loss: 0.279 Acc.: 0.8933
-----------------------------
Best val Acc: 0.9067 Olhando os resultados, fica claro que seria necessário adotar alguma estratégia para diminuir o overfitting. Poderíamos ter escrito um modelo mais customizado e adicionado camadas de dropout.
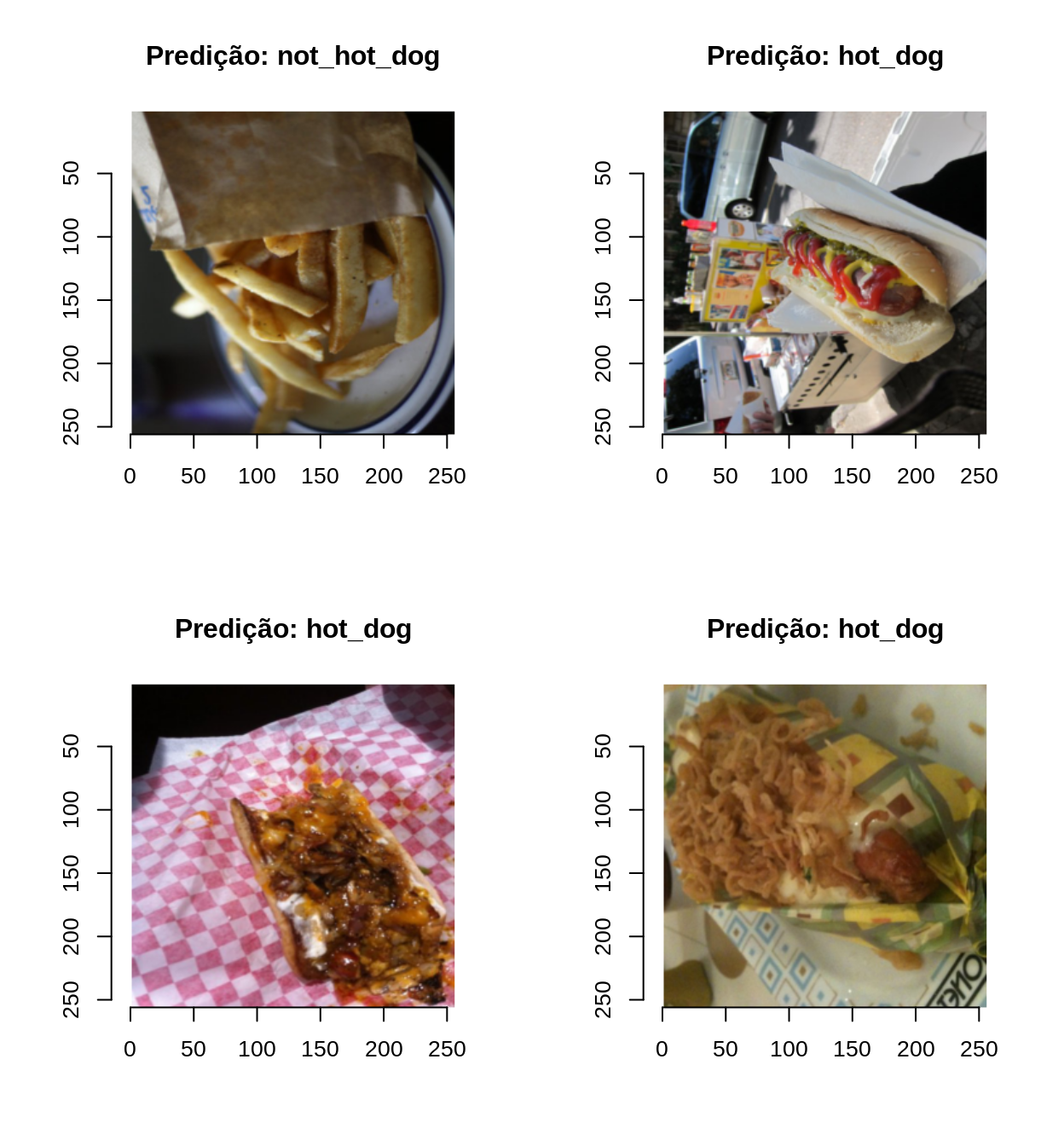
Plotando predições
Agora vamos ver como o nosso classificador se sai:
iter_test <- py$iter(dataloaders[["test"]])
c(images, labels) %<-% iter_next(iter_test)
images <- images$to(device)
preds <- model_ft(images)
preds <- torch$max(preds, 1L)$indices
preds <- preds$cpu()$numpy()
preds <- class_names[preds + 1]
images <- images$cpu()$numpy()
layout(matrix(1:4, 2, 2))
for(i in 1:4){
images[i, , , , drop = FALSE] %>%
aperm(c(3, 4, 1, 2)) %>%
as.cimg() %>%
plot(main = glue("Predição: {preds[i]}"))
}
Resultado na base de teste
test_acc <- 0
running_corrects <- 0
invisible(model_ft$eval())
N <- dataset_sizes[["test"]]
iter_data <- py$iter(dataloaders[["test"]])
with(torch$no_grad(), {
while (TRUE) {
data <- iter_next(iter_data)
if (is.null(data)) {
break
}
inputs <- data[[1]]
inputs <- inputs$to(device)
labels <- data[[2]]
labels <- labels$to(device)
outputs <- model_ft(inputs)
preds <- torch$max(outputs, 1L)$indices
running_corrects <- running_corrects + sum(preds$cpu()$numpy() == labels$cpu()$numpy())
}
cat("-----------------------------\n")
cat(glue("Test Acc: {round(running_corrects/N, 4)}"), "\n")
})
-----------------------------
Test Acc: 0.92 Nosso modelo conseguiu atingir a acurácia de 92,0%!
Com isso, fechamos esse post! A ideia era mostrar que pode-se usar facilmente uma biblioteca em Python no R com a ajuda do reticulate. Dessa forma, não precisamos nos limitar a uma linguagem única e aproveitar o melhor de cada!